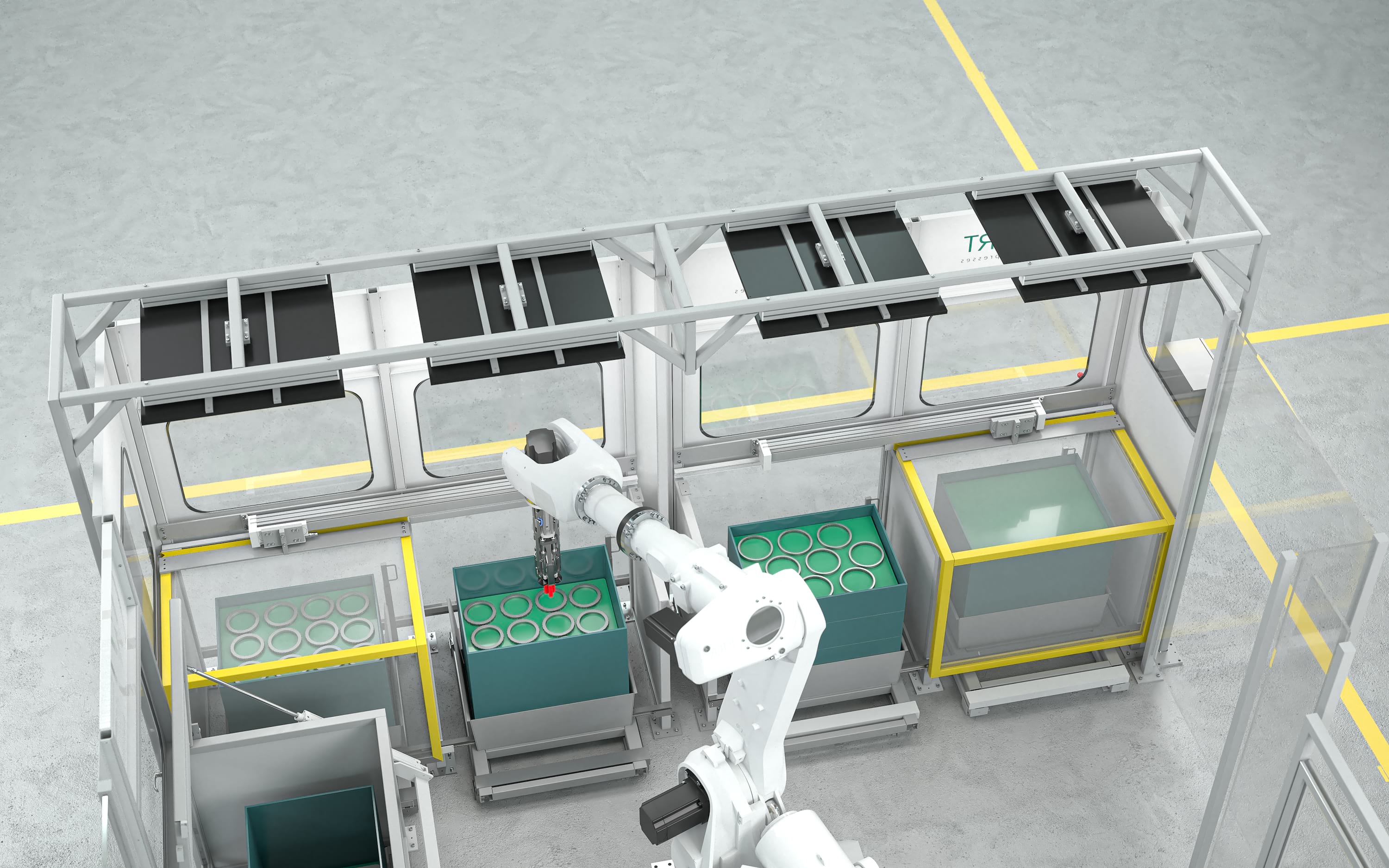
The chaotic gripping of rotationally symmetrical components placed under several layer separators is a demanding handling task. If this is to be achieved by a single gripper without make-ready times, it is necessary to break new ground and develop an intelligent solution.
Wickert Maschinenbau, Landau/Pfalz, Germany, took up this challenge to completely automate a component infeed and outfeed buffer of Wickert hardening plants.
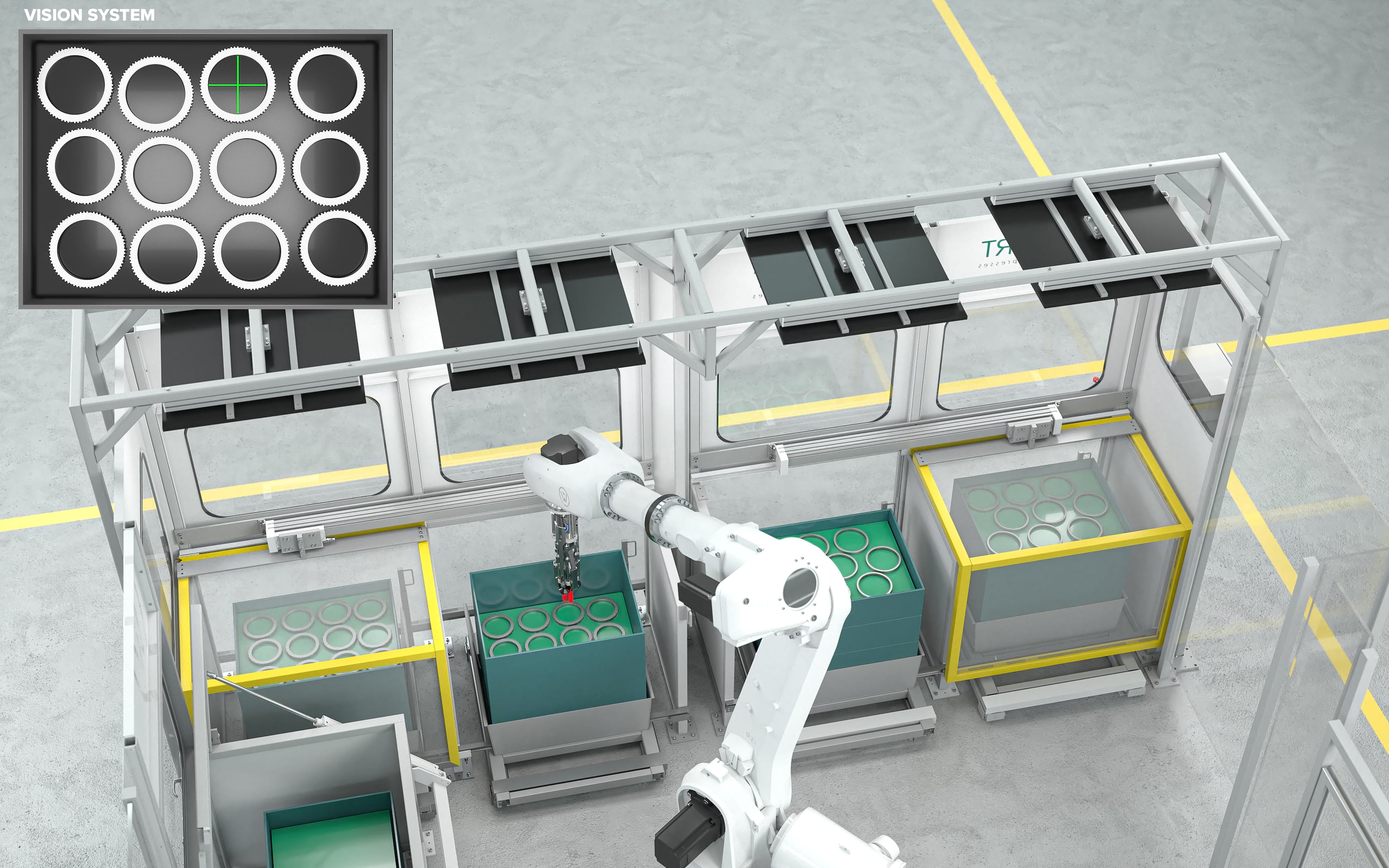
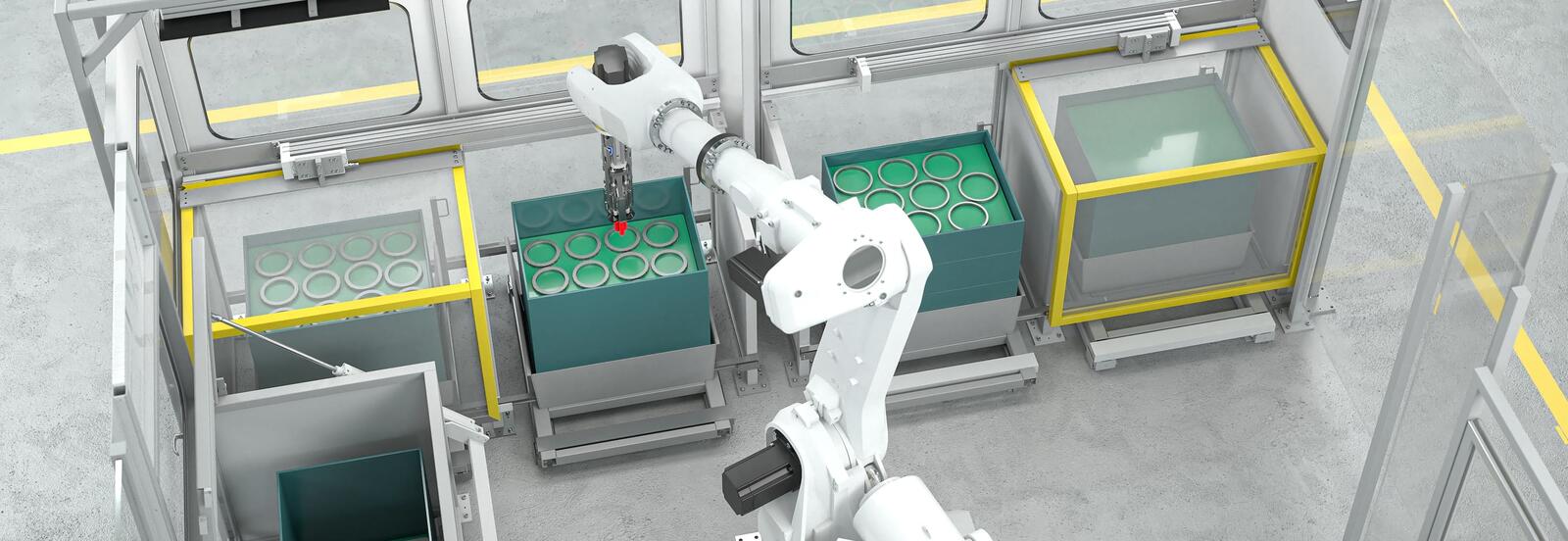
The aim was to develop a compact slim-design gripper that would not only remove components, such as gear wheels in the individual layers from a box; the new type of gripper was also intended to remove the layer separators above the next layer of components as soon as all parts of a layer had been removed and restacked after the hardening process. The result of the development process is a multifunctional gripper equipped with a vision system. In interaction with a camera, the handling system recognises not only the components and their positioning within a box, but also the layer separators.
Pallet exchange without interruption of production
The combination of a cycle time decoupled material lock, which enables material pallets to be exchanged without interrupting the cycle time, and a camera-supported handling system with the newly developed multifunctional gripper, make it easier to
the daily work of the line operator, as this is now reduced to changing the pallets.
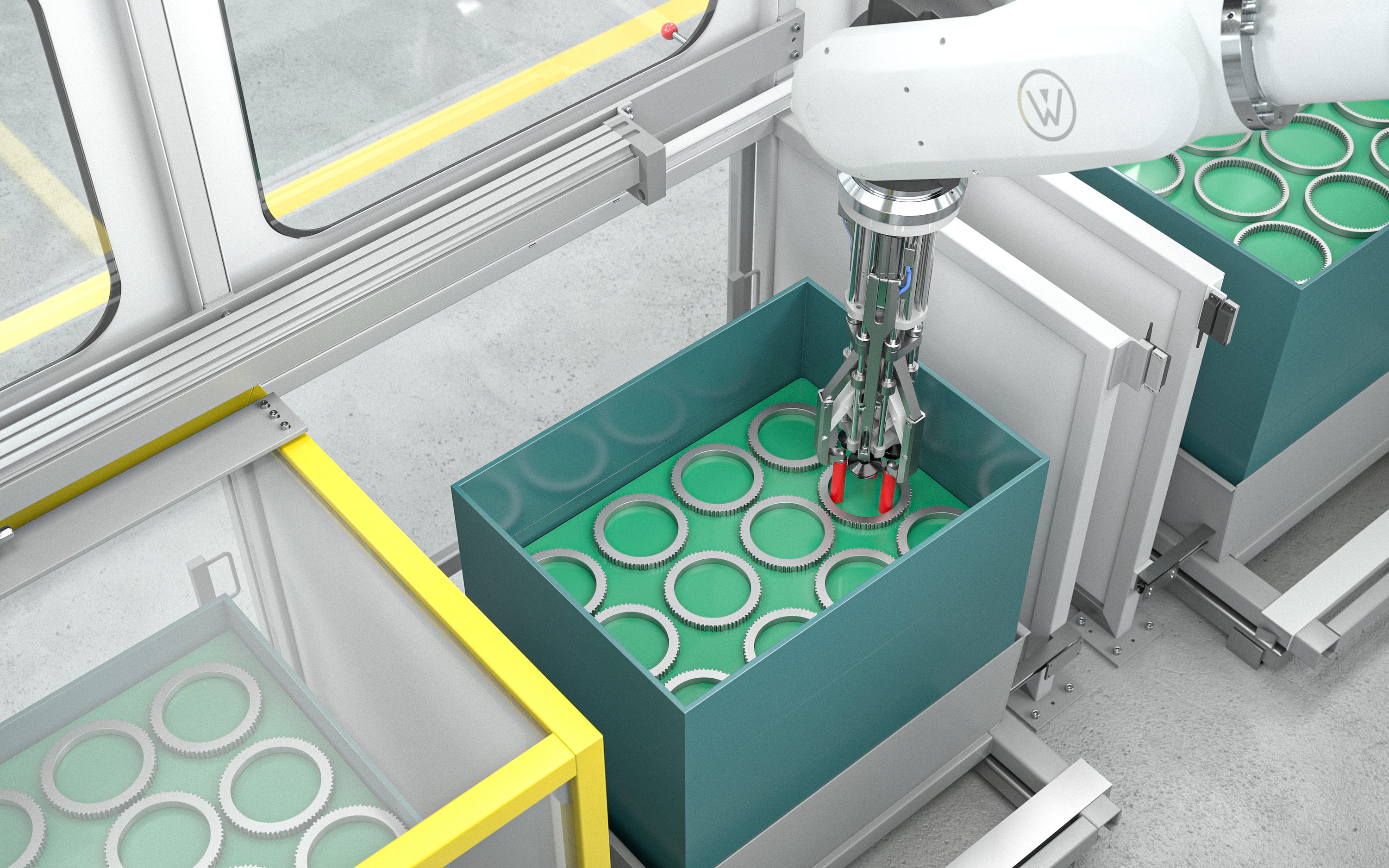
The components are gripped with an exact linear movement of the fingertips over the floor during opening and closing.
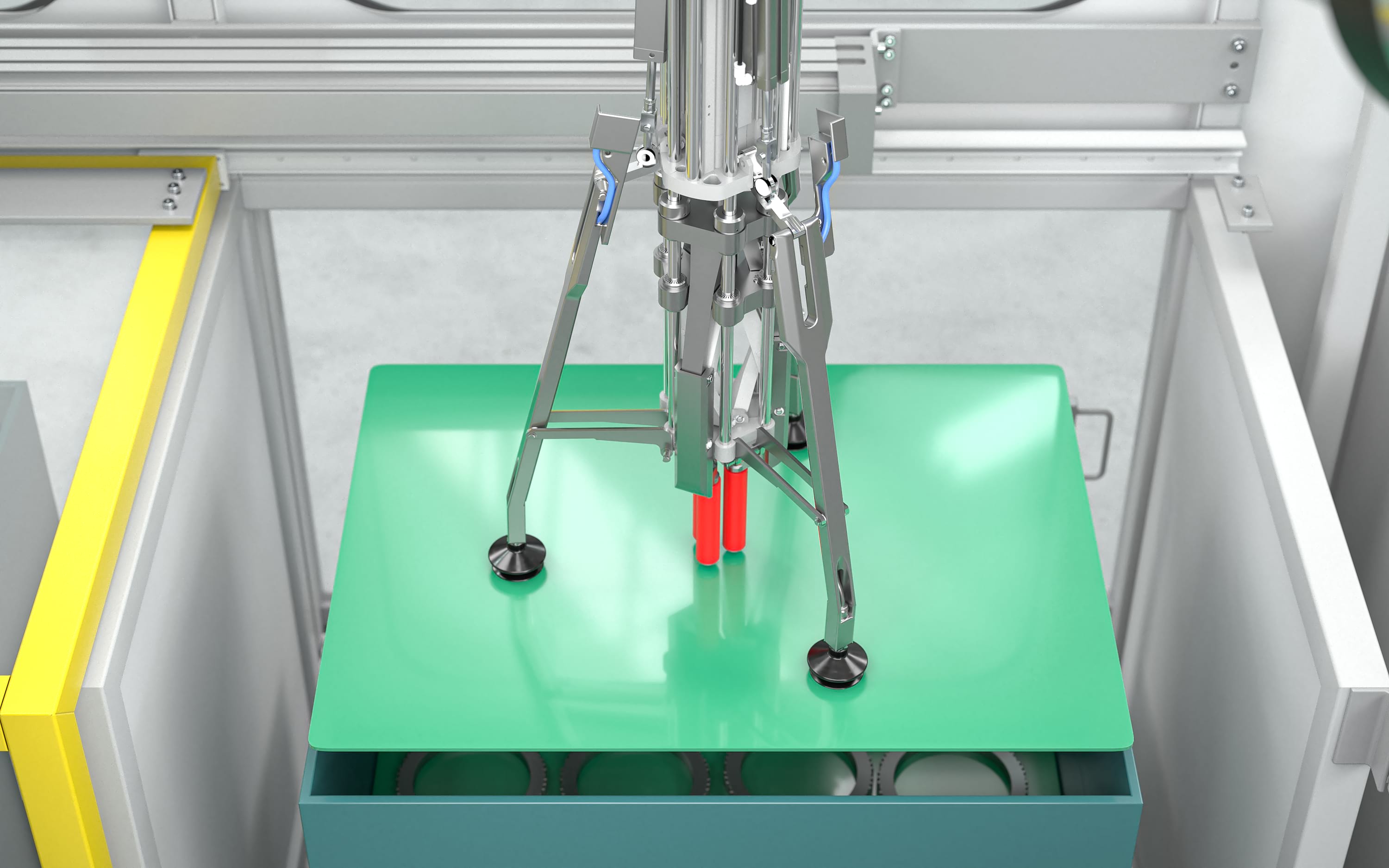
Two functions in one gripper
The second gripper group nestles very closely to the gripper arm during the transport of the components, so that this does not form any interfering contours when it enters the pallets.
As soon as a layer separator is to be removed, the gripper arms unfold.Equipped with vacuum cups, this module then lifts the layer separators. A very generously dimensioned stroke ensures, that the system continues to operate without any set-ups.
Product recognition creates process reliability
Position measuring systems in the gripper detect the diameter of the gripped component. Tolerance bands for specific component-diameters - stored in each part related recipe - enable a continuous plausibility check, which guarantees high process reliability right at the beginning of the value-added chain.
Components that are not "batch-suitable" are not even fed to the hardening plant, which ensures high productivity.
Thanks to its slim design, the multifunctional gripper can also grip or place small components in ahigh packing density. Moved by a robot, the fingers can always be ideally directed into the corners of the crates, so that components can be reached even in very narrow contours.
Depending on the geometric shape of the components, two to a maximum of six fingers can also be activated in groups. Thanks to this modular design, the same gripper can perform two to three different tasks with different finger groups.
This means that the gears can be fed fully automatically to a hardening system with a single gripper, without any make-ready processes, and after the hardening process the gears can be placed back into the transport boxes in multiple layers.